ROBOT ESFÉRICO
Descripción
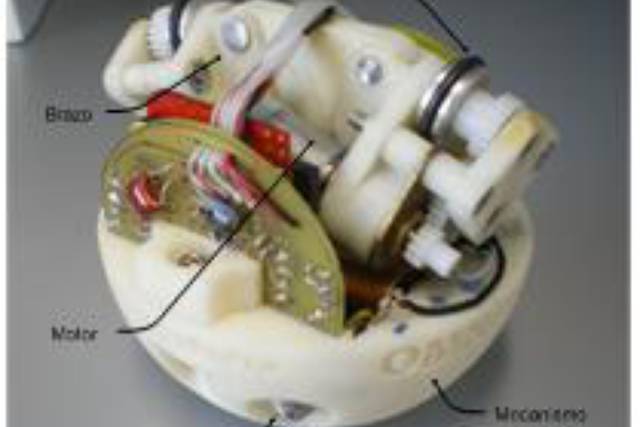
Son ya conocidos los robots esféricos capaces de desplazarse según diferentes trayectorias, pero suelen adolecer, en muchas ocasiones, de determinados inconvenientes, tales como que su movimiento no es continuo sino oscilatorio, complejo funcionamiento y control o necesidad de una precisión de fabricación del interior de la esfera que encarecerían su fabricación.
Así, la presente invención se refiere a un robot esférico, en el que los medios de accionamiento son de constitución y funcionamiento sencillos, con un número reducido de componentes y que además permiten un desplazamiento tanto rectilíneo como curvilíneo, es decir, es capaz de desplazarse en diferentes sentidos y según trayectorias distintas, estando constituido por una carcasa esférica en la que se alojan medios de accionamiento que actúan sobre la superficie interna de dicha carcasa para provocar su desplazamiento.
Además, este robot esférico asegura una actuación correcta de los medios de accionamiento, aunque la superficie interna de la carcasa esférica presente irregularidades.
Ventajas competitivas
Entre las ventajas de esta nueva invención, destacan las siguientes:
• Tamaño pequeño frente a otros robots del mercado, lo que hace que pueda introducirse en sitios de dimensiones reducidas.
• Posibilidad de fabricación en mayor tamaño.
• Su movimiento se produce en cualquier dirección del plano y su movimiento es uniforme y controlado, pudiendo realizar giros sin problemas.
• No cabe la posibilidad de bloqueo del mecanismo interior.
• La carcasa exterior o esfera que protege al mecanismo no tiene que fabricarse de una forma precisa, con lo que los costes de fabricación disminuyen considerablemente.
• El control del movimiento del robot se lleva a cabo de una manera muy sencilla, siendo fácil su implantación.
Usos y aplicaciones
La presente tecnología puede encontrar su campo de aplicación en el área de del juguete, la inspección de conductos de difícil acceso, sector militar o de seguridad.
Etiquetas
Sectores
Áreas
Número de publicación
ES2351457
Titulares
UNIVERSIDAD DE MÁLAGA
Inventores
JUAN ANTONIO CABRERA CARRILLO, FRANCISCO MANUEL GARCIA VACAS, PABLO GINER ABAD, MARIANO JAIMEZ TARIFA, ANTONIO ORTIZ FERNANDEZ, JUAN JESUS CASTILLO AGUILAR, FERNANDO NADAL MARTINEZ, ANTONIO SIMON MATA
Fecha de prioridad
06/08/2010
Nivel de protección: Nacional (España)
Estado de tramitación: Patente concedida a nivel nacional (España)